애들이 학교 마치는 2시 부터 시작하고 이동시간을 고려해서
남양주 덕소 - 양평 - 여주식으로 일정을 작성했는데
가는 카페(식량 보충)는 족족 폐업/일찍 닫음 ... -_-
아내가 양떼목장을 우선시 해서 일단 구리나 남양주의 공방은 전부 패스!
2시부터 8시 까지 인데 2시간 이동거리면 머 어떻게 되겠지!

거의 오락가락 하는 길 없이 최대한 동선을 짜봄

양평곤충박물관 - 원래 1빠. 하지만 시간상의 이유로 패스!
가다보니 카페 마카우 들어가기 전에 있는 그 곳

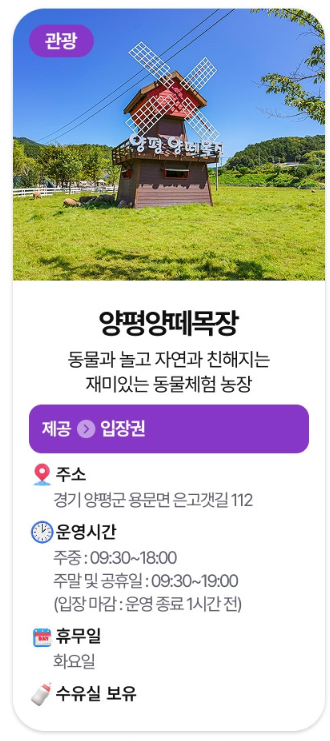
양평양떼목장 - 어쩌다 보니 시작. 입구는 실망스럽지만 안으로 들어가면 넓고 평온한 공간
시간이 좀만 더 여유로웠다면 하는 아쉬움이 있었다. 그리고 양은 하얗지 않아!
곰곰 베이커리 - 인터넷 찾아보니 큰줄 알았지만 작은 빵집
그 와중에 가보니 루나라는 카페로 바뀌어있어서 멘붕

여주 토우도예 - 사진과 다르게 일단 마을 회관 같은데서 했고
관장님께서 친절하게 밥집으로 이어주셨다!
아무튼 나도 하나 만들다 보니 빠져서 사진이 없는 아쉬운 곳.
앞으로는 여주쪽 일일패스로 도는게 나을지도 모르겠다 싶을 정도로 가이드를 해주셨다 ㅎㅎ

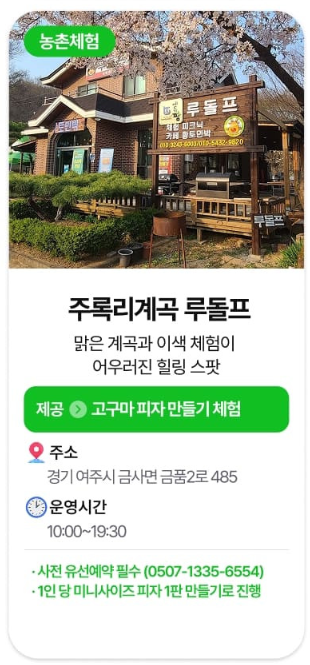
여주 루돌프 - 토우도예 관장님께서 시간 된다고 후다닥 전화해주셔서 가게 된 피자 체험.
사진보다 제법 큰 규모의 집이고 뒤로는 바베큐에 여러가지 체험을 할 수 있는 곳이라
다음에 또 오고 싶을 정도. (물론 피자 체험 돈내고 하기에는 부담 스러운지라..)
덕분에 배는 좀 채워서 살아남
카포레 - 돌아오는 길에 들르려고 했으나 7시에 도착했음에도 문을 닫아버렸다 -_

'개소리 왈왈 > 육아관련 주저리' 카테고리의 다른 글
| 하루 늦은 바쁜 일기 (0) | 2025.11.16 |
|---|---|
| 경기투어패스 part 2 (0) | 2025.11.14 |
| LG 천지 (0) | 2025.11.02 |
| 지쳤어요 땡벌 (0) | 2025.10.30 |
| 왜 반차는 더 피곤할까 (0) | 2025.10.27 |