이사님께서 nvidia 드라이버 깔기 짜증나는데 신경안써도 되는 좋은(!) OS가 있다고 해서 찾아봄
system76 이라는 하드웨어 생산업체가 ubuntu를 기반으로 rust로 갈아 엎었다는데 잘 모르겠네
[링크 : https://system76.com/pop/?srsltid=AfmBOory8SE6glZ2D4ND5kih8A5wB-pJnSS6SXs-5mfQwRsNyX-AJ4mo]
[링크 : https://system76.com/]
이사님께서 nvidia 드라이버 깔기 짜증나는데 신경안써도 되는 좋은(!) OS가 있다고 해서 찾아봄
system76 이라는 하드웨어 생산업체가 ubuntu를 기반으로 rust로 갈아 엎었다는데 잘 모르겠네
[링크 : https://system76.com/pop/?srsltid=AfmBOory8SE6glZ2D4ND5kih8A5wB-pJnSS6SXs-5mfQwRsNyX-AJ4mo]
[링크 : https://system76.com/]
| sudo add-apt-repository ppa:graphics-drivers/ppa ubuntu-drivers devices sudo ubuntu-drivers autoinstall |
| $ ubuntu-drivers devices == /sys/devices/pci0000:00/0000:00:01.0/0000:01:00.0 == modalias : pci:v000010DEd00001C03sv000010DEsd00000000bc03sc00i00 vendor : NVIDIA Corporation model : GP106 [GeForce GTX 1060 6GB] driver : nvidia-driver-550 - distro non-free driver : nvidia-driver-470 - distro non-free driver : nvidia-driver-450-server - distro non-free driver : nvidia-driver-565 - third-party non-free driver : nvidia-driver-575 - distro non-free recommended driver : nvidia-driver-580 - third-party non-free driver : nvidia-driver-470-server - distro non-free driver : nvidia-driver-575-server - distro non-free driver : nvidia-driver-570 - third-party non-free driver : nvidia-driver-545 - distro non-free driver : nvidia-driver-535 - distro non-free driver : nvidia-driver-418-server - distro non-free driver : nvidia-driver-390 - distro non-free driver : nvidia-driver-570-server - distro non-free driver : nvidia-driver-535-server - distro non-free driver : xserver-xorg-video-nouveau - distro free builtin |
| sudo apt-get install nvidia-driver-580 |
리부팅 이후
$ nvidia-smi
Wed Sep 3 10:53:56 2025
+-----------------------------------------------------------------------------------------+
| NVIDIA-SMI 580.76.05 Driver Version: 580.76.05 CUDA Version: 13.0 |
+-----------------------------------------+------------------------+----------------------+
| GPU Name Persistence-M | Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap | Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|=========================================+========================+======================|
| 0 NVIDIA GeForce GTX 1060 6GB Off | 00000000:01:00.0 On | N/A |
| 42% 38C P8 6W / 120W | 172MiB / 6144MiB | 1% Default |
| | | N/A |
+-----------------------------------------+------------------------+----------------------+
+-----------------------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=========================================================================================|
| 0 N/A N/A 976 G /usr/lib/xorg/Xorg 73MiB |
| 0 N/A N/A 1271 G /usr/bin/gnome-shell 86MiB |
+-----------------------------------------------------------------------------------------+[링크 : https://2dudwns.tistory.com/20]
cuda 설치도 패키지로..!
| sudo apt-get install nvidia-cuda-toolkit |
| eiq on windows with nvidia (0) | 2025.09.03 |
|---|---|
| vainfo (0) | 2025.09.03 |
| eiq 에러들 (0) | 2025.08.26 |
| eiq 학습 시도 (0) | 2025.08.26 |
| nvidia tao toolkit (0) | 2025.08.22 |
gemini를 MCP 로 연동해서 핸드폰 거치대를 만드는데
사용되는 토큰이 많이 차이나서 신기해 하는 중.
조작하는 문법이 많이 달라서 그런가?
blender
╭─────────────────────────────────────────────────────────────────────╮
│ > blender로 핸드폰 거치대를 그려줘 크기는 갤럭시 S25 에 맞게 해줘 │
╰─────────────────────────────────────────────────────────────────────╯
╭────────────────────────────────────────────────────────────╮
│ > 데모용으로 사용할 제품 동영상을 만들어줘 30초 분량으로 │
╰────────────────────────────────────────────────────────────╯

freecad
╭────────────────────────────────────────────────────────────────╮
│ > freecad 에서 갤럭시 S23 거치대를 만들어줘. 색상은 화이트로 │
╰────────────────────────────────────────────────────────────────╯
╭──────────────────────────────────────────────╮
│ > 색상을 빨간색-주황색으로 그라데이션 해줘 │
╰──────────────────────────────────────────────╯
| gemini + claude MCP (0) | 2025.09.05 |
|---|---|
| csm.ai (0) | 2025.09.01 |
| gemini + ubuntu + uvx 등등등.. 뻘기록 (0) | 2025.09.01 |
| claude desktop (0) | 2025.08.31 |
csm.ai 판촉(?)을 위한 blender MCP 였나.. 아무튼 csm.ai 보니
샘플로 간단한거 5개 뽑는게 한계일 것 같고, 결국에는 월 결제 해야지 멀 해먹을 수 있을 듯
[링크 : https://www.csm.ai/blog/csm-blender-mcp]
[링크 : https://www.csm.ai/]
free only 5 credit 이라고 되어있는데 이게 매달 차는것 같긴한데..

하단의 FAQ를 보면 swift re-topology 부터는 써보지도 못하는 수준.

[링크 : https://3d.csm.ai/pricing]
| gemini + claude MCP (0) | 2025.09.05 |
|---|---|
| gemini + blender / freecad token (0) | 2025.09.02 |
| gemini + ubuntu + uvx 등등등.. 뻘기록 (0) | 2025.09.01 |
| claude desktop (0) | 2025.08.31 |
시스코 스위치랑 라우터 사서 공부해볼까 하다가
프로그램으로도 웬만큼 해볼수 있다고 해서 고민중
그래도 실장비가 있는게 기분이 조크든요~ ㅋㅋ
| Packet Tracer나 GNS3 |
[링크 : https://www.reddit.com/r/ccna/comments/i2e56g/best_router_switch_combination_for_ccnaccnp/?tl=ko]
[링크 : https://www.gns3.com/]
gemini 매번 켜서 확인하기 귀찮아서 찾는데, mcp만 확인할 수 있는 명령이 있는 것 같다.
| $ gemini mcp gemini mcp Manage MCP servers 명령: gemini mcp add [args...] Add a server gemini mcp remove Remove a server gemini mcp list List all configured MCP servers 옵션: -h, --help 도움말 표시 [불리언] You need at least one command before continuing. |
아무튼 도대체 저 uvx freecad-mcp는 왜 안돼냐??!
| $ gemini mcp list Configured MCP servers: ✓ freecad: /usr/bin/python3 /home/user/.FreeCAD/Mod/freecad_mcp/src/freecad_bridge.py (stdio) - Connected ✗ freecad2: /snap/bin/uvx freecad-mcp (stdio) - Disconnected |
그래서 pypi에서 찾으니.. 어...
ubuntu 22.04 사용중이라 python이 3.10.. 흐음.. 설치하면 안되는거고..
| $ pip3 install freecad-mcp Defaulting to user installation because normal site-packages is not writeable ERROR: Ignored the following versions that require a different python version: 0.1.0 Requires-Python >=3.12; 0.1.1 Requires-Python >=3.12; 0.1.10 Requires-Python >=3.12; 0.1.11 Requires-Python >=3.12; 0.1.12 Requires-Python >=3.12; 0.1.13 Requires-Python >=3.12; 0.1.2 Requires-Python >=3.12; 0.1.3 Requires-Python >=3.12; 0.1.4 Requires-Python >=3.12; 0.1.5 Requires-Python >=3.12; 0.1.6 Requires-Python >=3.12; 0.1.7 Requires-Python >=3.12; 0.1.8 Requires-Python >=3.12; 0.1.9 Requires-Python >=3.12; 0.1.9.1 Requires-Python >=3.12 ERROR: Could not find a version that satisfies the requirement freecad-mcp (from versions: none) ERROR: No matching distribution found for freecad-mcp |
[링크 : https://pypi.org/project/freecad-mcp/]
python3.12를 추가로 설치하고 해도 안되는건 매한가지인데..
[링크 : https://blog.naver.com/chandong83/223339889839]
3.12가 기본인 배포판 가면 좀 편하게 가능하려나?
+
| gemini + claude MCP (0) | 2025.09.05 |
|---|---|
| gemini + blender / freecad token (0) | 2025.09.02 |
| csm.ai (0) | 2025.09.01 |
| claude desktop (0) | 2025.08.31 |
uvx로는 영 안되네.. 머가 문제일까..
일단 아래꺼는 리눅스에서 되는 녀석.
[링크 : https://github.com/CommonSenseMachines/blender-mcp]
버전 정보는 아래와 같다.
| ubuntu 22.04 LTS python 3.10 fastmcp 2.12.0 |
git 을 받아서
edit - preferences - Add-ons - 아래 화살표 - Install from Disk
addon.py 선택


XYZ 있는 오른쪽에 < 를 눌러서

BlenderMCP 에서 Connect to MCP Server 실행

src/server.py 에서 description 부분 삭제 후
| # Create the MCP server with lifespan support mcp = FastMCP( "BlenderMCP", lifespan=server_lifespan ) |
빌드해서 모듈로 넣어 버리고
| $ cd blender-mcp $ pip install -e . |
[링크 : https://github.com/awslabs/mcp/issues/996]
gemini 설정 파일에, 콤마부터 잊지 말고 넣어 주면 끝!
| $ cat settings.json { "theme": "Atom One", "selectedAuthType": "oauth-personal", "mcpServers": { "freecad": { "command": "/usr/bin/python3", "args": [ "/home/falinux/.FreeCAD/Mod/freecad_mcp/src/freecad_bridge.py" ] }, "blender": { "command": "/usr/bin/python3", "args": [ "-m", "blender_mcp.server" ] } } } |
gemini 실행해서 시키면 끝!
근데 원숭이는 맞는데.. 녹색이 아니잖아?!

+
csm.ai를 연동하면 모델들도 가져올수 있나 보다?
| ✦ 죄송합니다. CSM.ai 통합이 활성화되어 있지 않아 피카츄 모델을 가져올 수 없습니다. 블렌더의 MCP 패널에서 CSM.ai 통합을 활성화해 주시면 다시 시도해 보겠습니다. 다른 기본 도형으로 만들 수 있는 것을 그려드릴까요? |
[링크 : https://www.csm.ai/blog/csm-blender-mcp]
-------------------
[링크 : https://seahrin.com/entry/gemini-cli를-이용하여-mcp-활용하기with-blender]
[링크 : https://github.com/ahujasid/blender-mcp] uvx / claude <<
| 3d model 다운로드 / blender import (0) | 2026.06.24 |
|---|---|
| blener ll3m (0) | 2026.05.27 |
| blender로 stl 구멍 메우기 (0) | 2025.08.20 |
| blender 휠 에뮬레이트 하기 (0) | 2025.05.18 |
| blender + kinect (0) | 2025.04.16 |
mcp를 받아서 설치하는데 zip으로 받아서
freecad_mcp_main 으로 풀리는 디렉토리를 통채로 Mod로 옮겨준다
| $ cp freecad_mcp_main ~/.Freecad/Mod/freecad_mcp |
[링크 : https://github.com/bonninr/freecad_mcp]
gemini 설정도 수정해주고
| ~/.gemini$ cat settings.json { "theme": "Atom One", "selectedAuthType": "oauth-personal", "mcpServers": { "freecad": { "command": "/usr/bin/python3", "args": [ "/home/user/.FreeCAD/Mod/freecad_mcp/src/freecad_bridge.py" ] } } } |
freecad를 재시작하거나 처음 시작하면 workbench에 FreeCAD MCP 라는게 생겨난다.

메뉴에서 FreeCAD MCP - Show FreeCAD MCP Panel 누르면 Tasks에 창이 열리는데 Start Server 눌러준다.

freecad 에서 start RPC server 하면 9876 포트로 생성된다.
| $ netstat -tnlp (Not all processes could be identified, non-owned process info will not be shown, you would have to be root to see it all.) Active Internet connections (only servers) Proto Recv-Q Send-Q Local Address Foreign Address State PID/Program name tcp 0 0 127.0.0.1:9876 0.0.0.0:* LISTEN 3295252/freecad |
FastMCP 모듈이 없으면 일단 설치해주고
| $ pip3 install FastMCP |
gemini를 실행하고 ctrl-t를 눌러 Ready라고 뜨면 끝
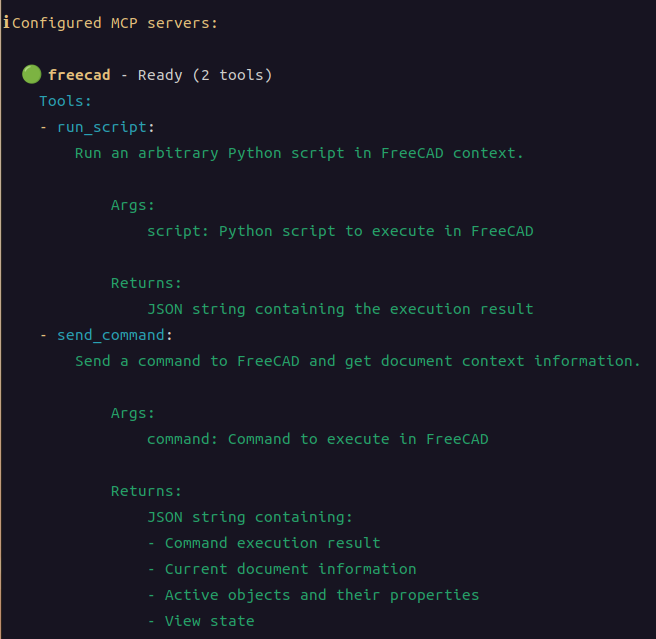
생성 성공!
그런데 claude 용으로는 MCP 인데.. 같이 연결 못하나?

| claude mcp + freecad (0) | 2025.08.31 |
|---|---|
| freeCAD + openFOAM (0) | 2025.08.29 |
| freecad + MCP (0) | 2025.08.29 |
| freecad on ubuntu 24.04 (0) | 2025.05.18 |
| freecad 예제 (0) | 2024.11.09 |
claude 무료버전으로 시도함
cluade desktop 설치하고
[링크 : https://claude.ai/download]
freecad 설치하고
freecad 한번 실행해준 다음 << 요거 포인트
[링크 : https://www.freecad.org/downloads.php]
mcp를 다운로드 받고 (윈도우니 귀찮아서 zip으로 받음)
압축을 풀고는 addon -> FreeCADMCP 폴더만 콕! 찍어서

탐색기에서 %AppData% 입력하고 엔터치고

FreeCAD 아래에 Mod 디렉토리를 만들고 FreeCADMCP 디렉토리를 붙여넣는다.
C:\Users\user\AppData\Roaming\FreeCAD\Mod\FreeCADMCP
[링크 : https://github.com/neka-nat/freecad-mcp]
freecad를 재시작 혹은 시작하면
Part Design 이라고 써있는 부분을 클릭하면

MCP Addon이 추가된다.

MCP Addon을 클릭하면
스케치하기는 어디로 가버리고(!) FreeCAD MCP 메뉴가 생겨나는데, start RPC server를 누르란다.
그런데 티가 안나네..

claude desktop에서 - 계정 - 설정 - 개발자 - 구성편집

그러면 탐색기가 열리면서 claude_desktop_config.json이 선택되는데
우클릭해서 메모장에서 편집하면 괄호만 덩그러니 있는데

아래처럼 붙여넣고 저장!

git 도움말에는 오른쪽꺼가 토큰을 덜 먹는다고 하니 일단 이걸로!
| { "mcpServers": { "freecad": { "command": "uvx", "args": [ "freecad-mcp" ] } } } |
{ "mcpServers": { "freecad": { "command": "uvx", "args": [ "freecad-mcp", "--only-text-feedback" ] } } } |
파워셀을 열어서 하라는 대로 하면 설치 완료
| PS C:\Users\user> powershell -ExecutionPolicy ByPass -c "irm https://astral.sh/uv/install.ps1 | iex" Downloading uv 0.8.14 (x86_64-pc-windows-msvc) Installing to C:\Users\user\.local\bin uv.exe uvx.exe uvw.exe everything's installed! To add C:\Users\user\.local\bin to your PATH, either restart your shell or run: set Path=C:\Users\user\.local\bin;%Path% (cmd) $env:Path = "C:\Users\user\.local\bin;$env:Path" (powershell) PS C:\Users\user> $env:Path = "C:\Users\user\.local\bin;$env:Path" PS C:\Users\user> uv An extremely fast Python package manager. Usage: uv.exe [OPTIONS] <COMMAND> Commands: run Run a command or script init Create a new project add Add dependencies to the project remove Remove dependencies from the project version Read or update the project's version sync Update the project's environment lock Update the project's lockfile export Export the project's lockfile to an alternate format tree Display the project's dependency tree format Format Python code in the project tool Run and install commands provided by Python packages python Manage Python versions and installations pip Manage Python packages with a pip-compatible interface venv Create a virtual environment build Build Python packages into source distributions and wheels publish Upload distributions to an index cache Manage uv's cache self Manage the uv executable help Display documentation for a command Cache options: -n, --no-cache Avoid reading from or writing to the cache, instead using a temporary directory for the duration of the operation [env: UV_NO_CACHE=] --cache-dir <CACHE_DIR> Path to the cache directory [env: UV_CACHE_DIR=] Python options: --managed-python Require use of uv-managed Python versions [env: UV_MANAGED_PYTHON=] --no-managed-python Disable use of uv-managed Python versions [env: UV_NO_MANAGED_PYTHON=] --no-python-downloads Disable automatic downloads of Python. [env: "UV_PYTHON_DOWNLOADS=never"] Global options: -q, --quiet... Use quiet output -v, --verbose... Use verbose output --color <COLOR_CHOICE> Control the use of color in output [possible values: auto, always, never] --native-tls Whether to load TLS certificates from the platform's native certificate store [env: UV_NATIVE_TLS=] --offline Disable network access [env: UV_OFFLINE=] --allow-insecure-host <ALLOW_INSECURE_HOST> Allow insecure connections to a host [env: UV_INSECURE_HOST=] --no-progress Hide all progress outputs [env: UV_NO_PROGRESS=] --directory <DIRECTORY> Change to the given directory prior to running the command --project <PROJECT> Run the command within the given project directory [env: UV_PROJECT=] --config-file <CONFIG_FILE> The path to a `uv.toml` file to use for configuration [env: UV_CONFIG_FILE=] --no-config Avoid discovering configuration files (`pyproject.toml`, `uv.toml`) [env: UV_NO_CONFIG=] -h, --help Display the concise help for this command -V, --version Display the uv version Use `uv help` for more details. |
[링크 : https://docs.astral.sh/uv/getting-started/installation/#__tabbed_1_2]
재시작하고 커넥터를 보면 freecad 로컬 개발이라고 뜬다.

freecad에 오면
보기 - 패널 - python 콘솔을 눌러주면 Start RPC Server를 주구장창 누른 흔적이 ㅋㅋ

먼가 시키니까 처음이라서 권한을 달라고 한다.

먼가 열심히 한다 ㅋㅋ
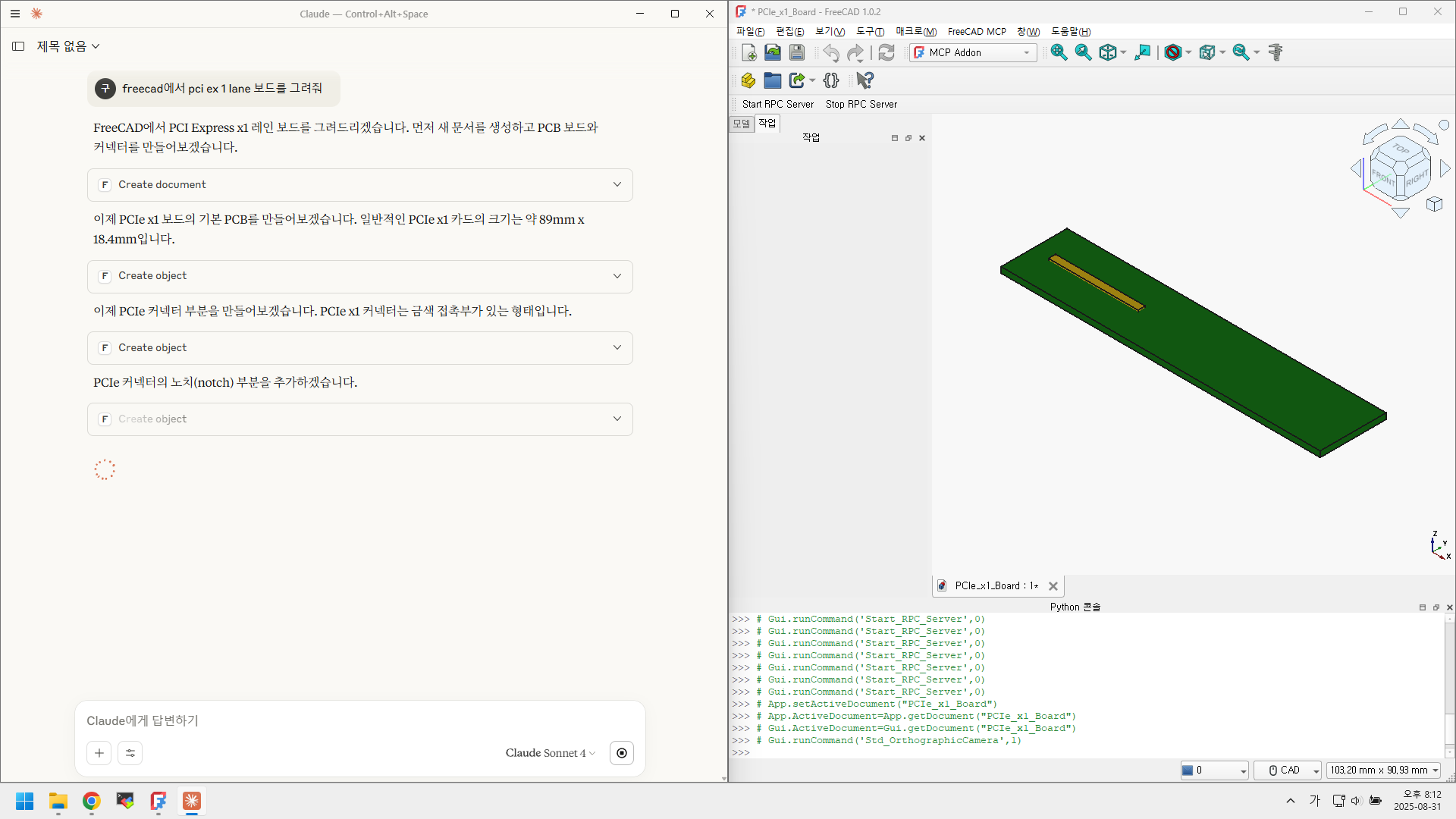
어.. 내가 상상(?)한 pci ex 1 lane 보드는 이렇게 생긴게 아닌디...?!

아무튼(?!?!) 이렇게 날로먹는(!) claude.ai desktop + MCP + freeCAD 성공!
아래 동영상을 보고 시도할 생각을 함
| gemini + freecad (0) | 2025.09.01 |
|---|---|
| freeCAD + openFOAM (0) | 2025.08.29 |
| freecad + MCP (0) | 2025.08.29 |
| freecad on ubuntu 24.04 (0) | 2025.05.18 |
| freecad 예제 (0) | 2024.11.09 |
| gemini + claude MCP (0) | 2025.09.05 |
|---|---|
| gemini + blender / freecad token (0) | 2025.09.02 |
| csm.ai (0) | 2025.09.01 |
| gemini + ubuntu + uvx 등등등.. 뻘기록 (0) | 2025.09.01 |

|



