git을 clone 하고
[링크 : https://github.com/espressif/esp-at]
python 패키지로 cmake를 따로 깔아야 하는군..
| $ pip3 install cmake Collecting cmake Downloading cmake-3.28.1-py2.py3-none-manylinux2014_x86_64.manylinux_2_17_x86_64.whl.metadata (6.3 kB) Downloading cmake-3.28.1-py2.py3-none-manylinux2014_x86_64.manylinux_2_17_x86_64.whl (26.3 MB) ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 26.3/26.3 MB 2.4 MB/s eta 0:00:00 Installing collected packages: cmake Successfully installed cmake-3.28.1 |
펌웨어 디렉토리 와서 아까 개발환경 export.sh 하고 나온걸 쳐보니 안된다.
| ~/src/esp/esp-at$ idf.py build Executing action: all (aliases: build) Running cmake in directory /home/minimonk/src/esp/esp-at/build Executing "cmake -G Ninja -DPYTHON_DEPS_CHECKED=1 -DPYTHON=/home/minimonk/.espressif/python_env/idf5.3_py3.10_env/bin/python -DESP_PLATFORM=1 -DCCACHE_ENABLE=0 /home/minimonk/src/esp/esp-at"... CMake Error at CMakeLists.txt:9 (string): string no output variable specified CMake Error at CMakeLists.txt:10 (string): string sub-command STRIP requires two arguments. CMake Error at CMakeLists.txt:14 (string): string begin index: 9 is out of range 0 - 0 CMake Error at CMakeLists.txt:15 (string): string sub-command STRIP requires two arguments. CMake Error at CMakeLists.txt:16 (string): string no output variable specified silence:0 sdkconfig:/home/minimonk/src/esp/esp-at/module_config/module__default/sdkconfig.defaults esp-at branch: master esp-at docs version: latest CMake Error at CMakeLists.txt:93 (include): include could not find requested file: /home/minimonk/src/esp/esp-at/esp-idf/tools/cmake/project.cmake -- The C compiler identification is GNU 11.4.0 -- The CXX compiler identification is GNU 11.4.0 -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Check for working C compiler: /usr/bin/cc - skipped -- Detecting C compile features -- Detecting C compile features - done -- Detecting CXX compiler ABI info -- Detecting CXX compiler ABI info - done -- Check for working CXX compiler: /usr/bin/c++ - skipped -- Detecting CXX compile features -- Detecting CXX compile features - done CMake Error at CMakeLists.txt:131 (add_dependencies): Cannot add target-level dependencies to non-existent target "flash". The add_dependencies works for top-level logical targets created by the add_executable, add_library, or add_custom_target commands. If you want to add file-level dependencies see the DEPENDS option of the add_custom_target and add_custom_command commands. -- Configuring incomplete, errors occurred! cmake failed with exit code 1, output of the command is in the /home/minimonk/src/esp/esp-at/build/log/idf_py_stderr_output_9922 and /home/minimonk/src/esp/esp-at/build/log/idf_py_stdout_output_9922 |
걍 build.py를 실행하니 잘 되긴 개뿔 -_-
(silence mode를 no로 해서 용량이 초과되니, 다시 빌드중)
| $ ./build.py Platform name: 1. PLATFORM_ESP32 2. PLATFORM_ESP32C3 3. PLATFORM_ESP32C2 4. PLATFORM_ESP32C6 choose(range[1,4]):1 Module name: 1. WROOM-32 2. WROVER-32 3. PICO-D4 4. SOLO-1 5. MINI-1 (description: ESP32-U4WDH chip inside) 6. ESP32-SDIO 7. ESP32-D2WD (description: 2MB flash, No OTA) choose(range[1,7]):1 Enable silence mode to remove some logs and reduce the firmware size? 0. No 1. Yes choose(range[0,1]):0 Platform name:ESP32 Module name:WROOM-32 Silence:0 Cloning into submodule:"esp-idf" from "https://github.com/espressif/esp-idf.git" (This may take some time).. 'esp-idf'에 복제합니다... remote: Enumerating objects: 544288, done. remote: Counting objects: 100% (90760/90760), done. remote: Compressing objects: 100% (4388/4388), done. remote: Total 544288 (delta 86693), reused 87944 (delta 86224), pack-reused 453528 오브젝트를 받는 중: 100% (544288/544288), 239.44 MiB | 9.68 MiB/s, 완료. 델타를 알아내는 중: 100% (410637/410637), 완료. 파일을 갱신합니다: 100% (10137/10137), 완료. Synchronizing submodule:"esp-idf" from "https://github.com/espressif/esp-idf.git" (This may take time).. old commit: 9fe3bf2a3cdfae3f2a7bbc846561be6b3e540337 checkout commit: 8fbf4ba6058bcf736317d8a7aa75d0578563c38b https://github.com/espressif/esp-idf URL에서 * branch release/v5.0 -> FETCH_HEAD 이미 업데이트 상태입니다. 'components/bootloader/subproject/components/micro-ecc/micro-ecc' 경로에 대해 'components/bootloader/subproject/components/micro-ecc/micro-ecc' (https://github.com/kmackay/micro-ecc.git) 하위 모듈 등록 'components/bt/controller/lib_esp32' 경로에 대해 'components/bt/controller/lib_esp32' (https://github.com/espressif/esp32-bt-lib.git) 하위 모듈 등록 'components/bt/controller/lib_esp32c2/esp32c2-bt-lib' 경로에 대해 'components/bt/controller/lib_esp32c2/esp32c2-bt-lib' (https://github.com/espressif/esp32c2-bt-lib.git) 하위 모듈 등록 'components/bt/controller/lib_esp32c3_family' 경로에 대해 'components/bt/controller/lib_esp32c3_family' (https://github.com/espressif/esp32c3-bt-lib.git) 하위 모듈 등록 'components/bt/controller/lib_esp32h2/esp32h2-bt-lib' 경로에 대해 'components/bt/controller/lib_esp32h2/esp32h2-bt-lib' (https://github.com/espressif/esp32h2-bt-lib.git) 하위 모듈 등록 'components/bt/host/nimble/nimble' 경로에 대해 'components/bt/host/nimble/nimble' (https://github.com/espressif/esp-nimble.git) 하위 모듈 등록 'components/cmock/CMock' 경로에 대해 'components/cmock/CMock' (https://github.com/ThrowTheSwitch/CMock.git) 하위 모듈 등록 'components/esp_phy/lib' 경로에 대해 'components/esp_phy/lib' (https://github.com/espressif/esp-phy-lib.git) 하위 모듈 등록 'components/esp_wifi/lib' 경로에 대해 'components/esp_wifi/lib' (https://github.com/espressif/esp32-wifi-lib.git) 하위 모듈 등록 'components/heap/tlsf' 경로에 대해 'components/heap/tlsf' (https://github.com/espressif/tlsf.git) 하위 모듈 등록 'components/ieee802154/lib' 경로에 대해 'components/ieee802154/lib' (https://github.com/espressif/esp-ieee802154-lib.git) 하위 모듈 등록 'components/json/cJSON' 경로에 대해 'components/json/cJSON' (https://github.com/DaveGamble/cJSON.git) 하위 모듈 등록 'components/lwip/lwip' 경로에 대해 'components/lwip/lwip' (https://github.com/espressif/esp-lwip.git) 하위 모듈 등록 'components/mbedtls/mbedtls' 경로에 대해 'components/mbedtls/mbedtls' (https://github.com/espressif/mbedtls.git) 하위 모듈 등록 'components/mqtt/esp-mqtt' 경로에 대해 'components/mqtt/esp-mqtt' (https://github.com/espressif/esp-mqtt.git) 하위 모듈 등록 'components/openthread/lib' 경로에 대해 'components/openthread/lib' (https://github.com/espressif/esp-thread-lib.git) 하위 모듈 등록 'components/openthread/openthread' 경로에 대해 'components/openthread/openthread' (https://github.com/espressif/openthread.git) 하위 모듈 등록 'components/protobuf-c/protobuf-c' 경로에 대해 'components/protobuf-c/protobuf-c' (https://github.com/protobuf-c/protobuf-c.git) 하위 모듈 등록 'components/spiffs/spiffs' 경로에 대해 'components/spiffs/spiffs' (https://github.com/pellepl/spiffs.git) 하위 모듈 등록 'components/unity/unity' 경로에 대해 'components/unity/unity' (https://github.com/ThrowTheSwitch/Unity.git) 하위 모듈 등록 '/home/minimonk/src/esp/esp-at/esp-idf/components/bootloader/subproject/components/micro-ecc/micro-ecc'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/bt/controller/lib_esp32'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/bt/controller/lib_esp32c2/esp32c2-bt-lib'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/bt/controller/lib_esp32c3_family'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/bt/controller/lib_esp32h2/esp32h2-bt-lib'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/bt/host/nimble/nimble'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/cmock/CMock'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/esp_phy/lib'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/esp_wifi/lib'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/heap/tlsf'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/ieee802154/lib'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/json/cJSON'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/lwip/lwip'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/mbedtls/mbedtls'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/mqtt/esp-mqtt'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/openthread/lib'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/openthread/openthread'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/protobuf-c/protobuf-c'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/spiffs/spiffs'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/unity/unity'에 복제합니다... Submodule path 'components/bootloader/subproject/components/micro-ecc/micro-ecc': checked out 'd037ec89546fad14b5c4d5456c2e23a71e554966' Submodule path 'components/bt/controller/lib_esp32': checked out '29e3ff2f39f16ff71e24bdd25ea87a0306e5b24b' Submodule path 'components/bt/controller/lib_esp32c2/esp32c2-bt-lib': checked out 'd17188c9f61400792a8248bf53378ee92e6f21a4' Submodule path 'components/bt/controller/lib_esp32c3_family': checked out 'b438f60a295183e7c67eb42ae05f4580f4b1ced0' Submodule path 'components/bt/controller/lib_esp32h2/esp32h2-bt-lib': checked out 'f502278684195b9c20626ec8bb25430030d2ff23' Submodule path 'components/bt/host/nimble/nimble': checked out '55c809a7525102508c97efc5fe50560e381fdc69' Submodule path 'components/cmock/CMock': checked out 'eeecc49ce8af123cf8ad40efdb9673e37b56230f' 'components/cmock/CMock/vendor/c_exception' 경로에 대해 'vendor/c_exception' (https://github.com/throwtheswitch/cexception.git) 하위 모듈 등록 'components/cmock/CMock/vendor/unity' 경로에 대해 'vendor/unity' (https://github.com/throwtheswitch/unity.git) 하위 모듈 등록 '/home/minimonk/src/esp/esp-at/esp-idf/components/cmock/CMock/vendor/c_exception'에 복제합니다... '/home/minimonk/src/esp/esp-at/esp-idf/components/cmock/CMock/vendor/unity'에 복제합니다... Submodule path 'components/cmock/CMock/vendor/c_exception': checked out '71b47be7c950f1bf5f7e5303779fa99a16224bb6' Submodule path 'components/cmock/CMock/vendor/unity': checked out 'cf949f45ca6d172a177b00da21310607b97bc7a7' Submodule path 'components/esp_phy/lib': checked out '086ac00e9894431f5cdbad6d8a8727c4acbd3f91' Submodule path 'components/esp_wifi/lib': checked out 'c8c75f7b7bc54a16f196f9396c3d231d30750ab1' Submodule path 'components/heap/tlsf': checked out '8c9cd0517adf99e363812e9a295dfe3898fdd345' Submodule path 'components/ieee802154/lib': checked out '2b52a261fef2ad7b630e11866dca567d17170401' Submodule path 'components/json/cJSON': checked out 'cb8693b058ba302f4829ec6d03f609ac6f848546' Submodule path 'components/lwip/lwip': checked out '8dad8d3ee66840deee4acfc1601de4e396c594be' Submodule path 'components/mbedtls/mbedtls': checked out '727a037da6f9a62a9d3d5def5bd21a2bc9c621c6' Submodule path 'components/mqtt/esp-mqtt': checked out 'ae53d799da294f03ef65c33e88fa33648e638134' Submodule path 'components/openthread/lib': checked out '698e8386c31f2c34e167b65f72a6b2553e838dd9' Submodule path 'components/openthread/openthread': checked out 'e64ba13faa865aa7febd5cb7dc7eb52ff19a2c5c' Submodule path 'components/protobuf-c/protobuf-c': checked out 'abc67a11c6db271bedbb9f58be85d6f4e2ea8389' Submodule path 'components/spiffs/spiffs': checked out '0dbb3f71c5f6fae3747a9d935372773762baf852' Submodule path 'components/unity/unity': checked out '7d2bf62b7e6afaf38153041a9d53c21aeeca9a25' submodules check completed for updates. mbedtls_dynamic_buffer.patch has been applied patches check completed for updates. Incorrect usage, please refer to https://docs.espressif.com/projects/esp-at/en/latest/esp32/Compile_and_Develop/How_to_clone_project_and_compile_it.html for more details. |
install 먼저해주고 build 해야 한단다 -_ㅠ
| $ ./build.py install Ready to install ESP-IDF prerequisites.. [sudo] minimonk 암호: 패키지 목록을 읽는 중입니다... 완료 의존성 트리를 만드는 중입니다... 완료 상태 정보를 읽는 중입니다... 완료 패키지 bison는 이미 최신 버전입니다 (2:3.8.2+dfsg-1build1). 패키지 flex는 이미 최신 버전입니다 (2.6.4-8build2). 패키지 libffi-dev는 이미 최신 버전입니다 (3.4.2-4). 패키지 wget는 이미 최신 버전입니다 (1.21.2-2ubuntu1). 패키지 ccache는 이미 최신 버전입니다 (4.5.1-1). 패키지 dfu-util는 이미 최신 버전입니다 (0.9-1). 패키지 gperf는 이미 최신 버전입니다 (3.1-1build1). 패키지 ninja-build는 이미 최신 버전입니다 (1.10.1-1). 패키지 cmake는 이미 최신 버전입니다 (3.22.1-1ubuntu1.22.04.1). 패키지 git는 이미 최신 버전입니다 (1:2.34.1-1ubuntu1.10). 패키지 libssl-dev는 이미 최신 버전입니다 (3.0.2-0ubuntu1.12). 패키지 libusb-1.0-0는 이미 최신 버전입니다 (2:1.0.25-1ubuntu2). 패키지 python3는 이미 최신 버전입니다 (3.10.6-1~22.04). 패키지 python3-setuptools는 이미 최신 버전입니다 (59.6.0-1.2ubuntu0.22.04.1). python3-setuptools 패키지는 수동설치로 지정합니다. 패키지 python3-pip는 이미 최신 버전입니다 (22.0.2+dfsg-1ubuntu0.4). 패키지 python3-venv는 이미 최신 버전입니다 (3.10.6-1~22.04). 0개 업그레이드, 0개 새로 설치, 0개 제거 및 3개 업그레이드 안 함. Ready to install ESP-AT prerequisites.. Requirement already satisfied: setuptools>=21 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r requirements.txt (line 4)) (69.0.2) Collecting cryptography<35,>=2.1.4 (from -r requirements.txt (line 9)) Downloading cryptography-3.4.8-cp36-abi3-manylinux_2_24_x86_64.whl (3.0 MB) ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 3.0/3.0 MB 6.9 MB/s eta 0:00:00 Collecting pycryptodome==3.15.0 (from -r requirements.txt (line 10)) Downloading pycryptodome-3.15.0-cp35-abi3-manylinux2010_x86_64.whl (2.3 MB) ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 2.3/2.3 MB 6.6 MB/s eta 0:00:00 Requirement already satisfied: idf-component-manager==1.4.1 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r requirements.txt (line 11)) (1.4.1) Requirement already satisfied: pyyaml in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r requirements.txt (line 14)) (6.0.1) Requirement already satisfied: xlrd in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r requirements.txt (line 15)) (2.0.1) Collecting configparser (from -r requirements.txt (line 16)) Downloading configparser-6.0.0-py3-none-any.whl.metadata (11 kB) Requirement already satisfied: cachecontrol[filecache] in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (0.13.1) Requirement already satisfied: click in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (8.1.7) Requirement already satisfied: colorama in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (0.4.6) Requirement already satisfied: packaging in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (23.2) Requirement already satisfied: pyparsing in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (3.1.1) Requirement already satisfied: requests in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (2.31.0) Requirement already satisfied: requests-file in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (1.5.1) Requirement already satisfied: requests-toolbelt in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (1.0.0) Requirement already satisfied: schema in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (0.7.5) Requirement already satisfied: six in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (1.16.0) Requirement already satisfied: tqdm in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (4.66.1) Requirement already satisfied: urllib3<2 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (1.26.18) Requirement already satisfied: cffi>=1.12 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from cryptography<35,>=2.1.4->-r requirements.txt (line 9)) (1.16.0) Requirement already satisfied: pycparser in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from cffi>=1.12->cryptography<35,>=2.1.4->-r requirements.txt (line 9)) (2.21) Requirement already satisfied: msgpack>=0.5.2 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from cachecontrol[filecache]->idf-component-manager==1.4.1->-r requirements.txt (line 11)) (1.0.7) Requirement already satisfied: filelock>=3.8.0 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from cachecontrol[filecache]->idf-component-manager==1.4.1->-r requirements.txt (line 11)) (3.13.1) Requirement already satisfied: charset-normalizer<4,>=2 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from requests->idf-component-manager==1.4.1->-r requirements.txt (line 11)) (3.3.2) Requirement already satisfied: idna<4,>=2.5 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from requests->idf-component-manager==1.4.1->-r requirements.txt (line 11)) (3.6) Requirement already satisfied: certifi>=2017.4.17 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from requests->idf-component-manager==1.4.1->-r requirements.txt (line 11)) (2023.11.17) Requirement already satisfied: contextlib2>=0.5.5 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from schema->idf-component-manager==1.4.1->-r requirements.txt (line 11)) (21.6.0) Downloading configparser-6.0.0-py3-none-any.whl (19 kB) Installing collected packages: pycryptodome, configparser, cryptography Attempting uninstall: cryptography Found existing installation: cryptography 41.0.7 Uninstalling cryptography-41.0.7: Successfully uninstalled cryptography-41.0.7 Successfully installed configparser-6.0.0 cryptography-3.4.8 pycryptodome-3.15.0 Platform name:ESP32 Module name:WROOM-32 Silence:0 submodules check completed for updates. mbedtls_dynamic_buffer.patch does not need to be applied. patches check completed for updates. Ready to set up ESP-IDF tools.. Python 3.10.12 pip 23.3.2 from /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages/pip (python 3.10) Upgrading pip and setuptools... Requirement already satisfied: pip in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (23.3.2) Requirement already satisfied: setuptools in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (69.0.2) Downloading https://dl.espressif.com/dl/esp-idf/espidf.constraints.v5.0.txt Destination: /home/minimonk/.espressif/espidf.constraints.v5.0.txt.tmp Done Installing Python packages Constraint file: /home/minimonk/.espressif/espidf.constraints.v5.0.txt Requirement files: - /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt Looking in indexes: https://pypi.org/simple, https://dl.espressif.com/pypi Ignoring importlib_metadata: markers 'python_version < "3.8"' don't match your environment Ignoring windows-curses: markers 'sys_platform == "win32"' don't match your environment Requirement already satisfied: setuptools in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 3)) (69.0.2) Requirement already satisfied: packaging in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 4)) (23.2) Collecting click (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 7)) Downloading https://dl.espressif.com/pypi/click/click-8.0.4-py3-none-any.whl (97 kB) ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 97.5/97.5 kB 5.0 MB/s eta 0:00:00 Requirement already satisfied: pyserial in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 8)) (3.5) Collecting future (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 9)) Downloading https://dl.espressif.com/pypi/future/future-0.18.2-py3-none-any.whl (491 kB) ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 491.1/491.1 kB 21.8 MB/s eta 0:00:00 Requirement already satisfied: cryptography in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 10)) (3.4.8) Collecting cryptography (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 10)) Downloading https://dl.espressif.com/pypi/cryptography/cryptography-36.0.2-cp36-abi3-manylinux_2_24_x86_64.whl (3.6 MB) ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 3.6/3.6 MB 10.0 MB/s eta 0:00:00 Collecting pyparsing (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 11)) Downloading https://dl.espressif.com/pypi/pyparsing/pyparsing-3.0.9-py3-none-any.whl (98 kB) ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 98.3/98.3 kB 6.8 MB/s eta 0:00:00 Collecting pyelftools (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 12)) Downloading https://dl.espressif.com/pypi/pyelftools/pyelftools-0.27-py2.py3-none-any.whl (151 kB) ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 151.6/151.6 kB 1.1 MB/s eta 0:00:00 Requirement already satisfied: idf-component-manager in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (1.4.1) Requirement already satisfied: esp-coredump in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 14)) (1.9.0) Requirement already satisfied: esptool in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 15)) (4.7.0) Requirement already satisfied: kconfiglib in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 18)) (14.1.0) Requirement already satisfied: freertos_gdb in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 22)) (1.0.2) Requirement already satisfied: cffi>=1.12 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from cryptography->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 10)) (1.16.0) Requirement already satisfied: cachecontrol[filecache] in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (0.13.1) Requirement already satisfied: colorama in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (0.4.6) Requirement already satisfied: pyyaml in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (6.0.1) Requirement already satisfied: requests in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (2.31.0) Requirement already satisfied: requests-file in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (1.5.1) Requirement already satisfied: requests-toolbelt in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (1.0.0) Requirement already satisfied: schema in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (0.7.5) Requirement already satisfied: six in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (1.16.0) Requirement already satisfied: tqdm in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (4.66.1) Requirement already satisfied: urllib3<2 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (1.26.18) Requirement already satisfied: construct~=2.10 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from esp-coredump->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 14)) (2.10.69) Requirement already satisfied: pygdbmi>=0.9.0.2 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from esp-coredump->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 14)) (0.9.0.2) Requirement already satisfied: bitstring>=3.1.6 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from esptool->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 15)) (4.1.4) Requirement already satisfied: ecdsa>=0.16.0 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from esptool->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 15)) (0.18.0) Requirement already satisfied: reedsolo<1.8,>=1.5.3 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from esptool->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 15)) (1.7.0) Requirement already satisfied: intelhex in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from esptool->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 15)) (2.3.0) Requirement already satisfied: bitarray<3.0.0,>=2.8.0 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from bitstring>=3.1.6->esptool->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 15)) (2.9.0) Requirement already satisfied: pycparser in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from cffi>=1.12->cryptography->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 10)) (2.21) Requirement already satisfied: msgpack>=0.5.2 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from cachecontrol[filecache]->idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (1.0.7) Requirement already satisfied: filelock>=3.8.0 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from cachecontrol[filecache]->idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (3.13.1) Requirement already satisfied: charset-normalizer<4,>=2 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from requests->idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (3.3.2) Requirement already satisfied: idna<4,>=2.5 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from requests->idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (3.6) Requirement already satisfied: certifi>=2017.4.17 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from requests->idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (2023.11.17) Requirement already satisfied: contextlib2>=0.5.5 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from schema->idf-component-manager->-r /home/minimonk/src/esp/esp-at/esp-idf/tools/requirements/requirements.core.txt (line 13)) (21.6.0) Installing collected packages: pyelftools, pyparsing, future, click, cryptography Attempting uninstall: pyelftools Found existing installation: pyelftools 0.30 Uninstalling pyelftools-0.30: Successfully uninstalled pyelftools-0.30 Attempting uninstall: pyparsing Found existing installation: pyparsing 3.1.1 Uninstalling pyparsing-3.1.1: Successfully uninstalled pyparsing-3.1.1 Attempting uninstall: click Found existing installation: click 8.1.7 Uninstalling click-8.1.7: Successfully uninstalled click-8.1.7 Attempting uninstall: cryptography Found existing installation: cryptography 3.4.8 Uninstalling cryptography-3.4.8: Successfully uninstalled cryptography-3.4.8 Successfully installed click-8.0.4 cryptography-36.0.2 future-0.18.2 pyelftools-0.27 pyparsing-3.0.9 Current system platform: linux-amd64 Updating /home/minimonk/.espressif/idf-env.json Selected targets are: esp32 Installing tools: xtensa-esp-elf-gdb, xtensa-esp32-elf, esp32ulp-elf, openocd-esp32, esp-rom-elfs Installing xtensa-esp-elf-gdb@11.2_20220823 Downloading https://github.com/espressif/binutils-gdb/releases/download/esp-gdb-v11.2_20220823/xtensa-esp-elf-gdb-11.2_20220823-x86_64-linux-gnu.tar.gz Destination: /home/minimonk/.espressif/dist/xtensa-esp-elf-gdb-11.2_20220823-x86_64-linux-gnu.tar.gz.tmp Done Extracting /home/minimonk/.espressif/dist/xtensa-esp-elf-gdb-11.2_20220823-x86_64-linux-gnu.tar.gz to /home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/11.2_20220823 Installing xtensa-esp32-elf@esp-2022r1-11.2.0 Downloading https://github.com/espressif/crosstool-NG/releases/download/esp-2022r1/xtensa-esp32-elf-gcc11_2_0-esp-2022r1-linux-amd64.tar.xz Destination: /home/minimonk/.espressif/dist/xtensa-esp32-elf-gcc11_2_0-esp-2022r1-linux-amd64.tar.xz.tmp Done Extracting /home/minimonk/.espressif/dist/xtensa-esp32-elf-gcc11_2_0-esp-2022r1-linux-amd64.tar.xz to /home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0 Skipping esp32ulp-elf@2.35_20220830 (already installed) Installing openocd-esp32@v0.12.0-esp32-20230419 Downloading https://github.com/espressif/openocd-esp32/releases/download/v0.12.0-esp32-20230419/openocd-esp32-linux-amd64-0.12.0-esp32-20230419.tar.gz Destination: /home/minimonk/.espressif/dist/openocd-esp32-linux-amd64-0.12.0-esp32-20230419.tar.gz.tmp Done Extracting /home/minimonk/.espressif/dist/openocd-esp32-linux-amd64-0.12.0-esp32-20230419.tar.gz to /home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230419 Installing esp-rom-elfs@20220823 Downloading https://github.com/espressif/esp-rom-elfs/releases/download/20220823/esp-rom-elfs-20220823.tar.gz Destination: /home/minimonk/.espressif/dist/esp-rom-elfs-20220823.tar.gz.tmp Done Extracting /home/minimonk/.espressif/dist/esp-rom-elfs-20220823.tar.gz to /home/minimonk/.espressif/tools/esp-rom-elfs/20220823 Ready to set up environment variables.. PATH is /home/minimonk/src/esp/esp-idf/components/espcoredump:/home/minimonk/src/esp/esp-idf/components/partition_table:/home/minimonk/src/esp/esp-idf/components/app_update:/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/12.1_20231023/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf/esp-13.2.0_20230928/xtensa-esp-elf/bin:/home/minimonk/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230921/openocd-esp32/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/12.1_20231023/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf/esp-13.2.0_20230928/xtensa-esp-elf/bin:/home/minimonk/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230921/openocd-esp32/bin:/home/minimonk/.espressif/python_env/idf5.3_py3.10_env/bin:/home/minimonk/src/esp/esp-idf/tools:/home/minimonk/.local/bin:/home/minimonk/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin IDF_PYTHON_ENV_PATH is /home/minimonk/.espressif/python_env/idf5.3_py3.10_env sys.platform is linux Not using an unsupported version of tool xtensa-esp-elf-gdb found in PATH: 12.1_20231023. Not using an unsupported version of tool xtensa-esp32-elf found in PATH: esp-13.2.0_20230928-13.2.0. Not using an unsupported version of tool openocd-esp32 found in PATH: v0.12.0-esp32-20230921. export str is OPENOCD_SCRIPTS=/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230419/openocd-esp32/share/openocd/scripts ESP_ROM_ELF_DIR=/home/minimonk/.espressif/tools/esp-rom-elfs/20220823/ ESP_IDF_VERSION=5.0 PATH=/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/11.2_20220823/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0/xtensa-esp32-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230419/openocd-esp32/bin:/home/minimonk/src/esp/esp-at/esp-idf/tools:$PATH IDF_DEACTIVATE_FILE_PATH=/tmp/tmpf5mgwjzridf_10771 PATH is /home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/11.2_20220823/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0/xtensa-esp32-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230419/openocd-esp32/bin:/home/minimonk/src/esp/esp-at/esp-idf/tools:$PATH:/home/minimonk/src/esp/esp-idf/components/espcoredump:/home/minimonk/src/esp/esp-idf/components/partition_table:/home/minimonk/src/esp/esp-idf/components/app_update:/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/12.1_20231023/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf/esp-13.2.0_20230928/xtensa-esp-elf/bin:/home/minimonk/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230921/openocd-esp32/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/12.1_20231023/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf/esp-13.2.0_20230928/xtensa-esp-elf/bin:/home/minimonk/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230921/openocd-esp32/bin:/home/minimonk/.espressif/python_env/idf5.3_py3.10_env/bin:/home/minimonk/src/esp/esp-idf/tools:/home/minimonk/.local/bin:/home/minimonk/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin IDF_PYTHON_ENV_PATH is /home/minimonk/.espressif/python_env/idf5.3_py3.10_env Ready to install ESP-AT python packages.. Requirement already satisfied: setuptools>=21 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r requirements.txt (line 4)) (69.0.2) Collecting cryptography<35,>=2.1.4 (from -r requirements.txt (line 9)) Using cached cryptography-3.4.8-cp36-abi3-manylinux_2_24_x86_64.whl (3.0 MB) Requirement already satisfied: pycryptodome==3.15.0 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r requirements.txt (line 10)) (3.15.0) Requirement already satisfied: idf-component-manager==1.4.1 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r requirements.txt (line 11)) (1.4.1) Requirement already satisfied: pyyaml in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r requirements.txt (line 14)) (6.0.1) Requirement already satisfied: xlrd in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r requirements.txt (line 15)) (2.0.1) Requirement already satisfied: configparser in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from -r requirements.txt (line 16)) (6.0.0) Requirement already satisfied: cachecontrol[filecache] in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (0.13.1) Requirement already satisfied: click in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (8.0.4) Requirement already satisfied: colorama in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (0.4.6) Requirement already satisfied: packaging in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (23.2) Requirement already satisfied: pyparsing in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (3.0.9) Requirement already satisfied: requests in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (2.31.0) Requirement already satisfied: requests-file in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (1.5.1) Requirement already satisfied: requests-toolbelt in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (1.0.0) Requirement already satisfied: schema in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (0.7.5) Requirement already satisfied: six in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (1.16.0) Requirement already satisfied: tqdm in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (4.66.1) Requirement already satisfied: urllib3<2 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from idf-component-manager==1.4.1->-r requirements.txt (line 11)) (1.26.18) Requirement already satisfied: cffi>=1.12 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from cryptography<35,>=2.1.4->-r requirements.txt (line 9)) (1.16.0) Requirement already satisfied: pycparser in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from cffi>=1.12->cryptography<35,>=2.1.4->-r requirements.txt (line 9)) (2.21) Requirement already satisfied: msgpack>=0.5.2 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from cachecontrol[filecache]->idf-component-manager==1.4.1->-r requirements.txt (line 11)) (1.0.7) Requirement already satisfied: filelock>=3.8.0 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from cachecontrol[filecache]->idf-component-manager==1.4.1->-r requirements.txt (line 11)) (3.13.1) Requirement already satisfied: charset-normalizer<4,>=2 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from requests->idf-component-manager==1.4.1->-r requirements.txt (line 11)) (3.3.2) Requirement already satisfied: idna<4,>=2.5 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from requests->idf-component-manager==1.4.1->-r requirements.txt (line 11)) (3.6) Requirement already satisfied: certifi>=2017.4.17 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from requests->idf-component-manager==1.4.1->-r requirements.txt (line 11)) (2023.11.17) Requirement already satisfied: contextlib2>=0.5.5 in /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/lib/python3.10/site-packages (from schema->idf-component-manager==1.4.1->-r requirements.txt (line 11)) (21.6.0) Installing collected packages: cryptography Attempting uninstall: cryptography Found existing installation: cryptography 36.0.2 Uninstalling cryptography-36.0.2: Successfully uninstalled cryptography-36.0.2 Successfully installed cryptography-3.4.8 All done! You can now run: ./build.py build |
| $ ./build.py build Platform name:ESP32 Module name:WROOM-32 Silence:0 submodules check completed for updates. mbedtls_dynamic_buffer.patch does not need to be applied. patches check completed for updates. Ready to set up environment variables.. PATH is /home/minimonk/src/esp/esp-idf/components/espcoredump:/home/minimonk/src/esp/esp-idf/components/partition_table:/home/minimonk/src/esp/esp-idf/components/app_update:/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/12.1_20231023/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf/esp-13.2.0_20230928/xtensa-esp-elf/bin:/home/minimonk/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230921/openocd-esp32/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/12.1_20231023/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf/esp-13.2.0_20230928/xtensa-esp-elf/bin:/home/minimonk/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230921/openocd-esp32/bin:/home/minimonk/.espressif/python_env/idf5.3_py3.10_env/bin:/home/minimonk/src/esp/esp-idf/tools:/home/minimonk/.local/bin:/home/minimonk/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin IDF_PYTHON_ENV_PATH is /home/minimonk/.espressif/python_env/idf5.3_py3.10_env sys.platform is linux Not using an unsupported version of tool xtensa-esp-elf-gdb found in PATH: 12.1_20231023. Not using an unsupported version of tool xtensa-esp32-elf found in PATH: esp-13.2.0_20230928-13.2.0. Not using an unsupported version of tool openocd-esp32 found in PATH: v0.12.0-esp32-20230921. export str is OPENOCD_SCRIPTS=/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230419/openocd-esp32/share/openocd/scripts ESP_ROM_ELF_DIR=/home/minimonk/.espressif/tools/esp-rom-elfs/20220823/ ESP_IDF_VERSION=5.0 PATH=/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/11.2_20220823/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0/xtensa-esp32-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230419/openocd-esp32/bin:/home/minimonk/src/esp/esp-at/esp-idf/tools:$PATH IDF_DEACTIVATE_FILE_PATH=/tmp/tmphrjbiveridf_10816 PATH is /home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/11.2_20220823/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0/xtensa-esp32-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230419/openocd-esp32/bin:/home/minimonk/src/esp/esp-at/esp-idf/tools:$PATH:/home/minimonk/src/esp/esp-idf/components/espcoredump:/home/minimonk/src/esp/esp-idf/components/partition_table:/home/minimonk/src/esp/esp-idf/components/app_update:/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/12.1_20231023/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf/esp-13.2.0_20230928/xtensa-esp-elf/bin:/home/minimonk/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230921/openocd-esp32/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/12.1_20231023/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf/esp-13.2.0_20230928/xtensa-esp-elf/bin:/home/minimonk/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230921/openocd-esp32/bin:/home/minimonk/.espressif/python_env/idf5.3_py3.10_env/bin:/home/minimonk/src/esp/esp-idf/tools:/home/minimonk/.local/bin:/home/minimonk/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin IDF_PYTHON_ENV_PATH is /home/minimonk/.espressif/python_env/idf5.3_py3.10_env Executing action: all (aliases: build) Running cmake in directory /home/minimonk/src/esp/esp-at/build Executing "cmake -G Ninja -DPYTHON_DEPS_CHECKED=1 -DESP_PLATFORM=1 -DIDF_TARGET=esp32 -DCCACHE_ENABLE=0 /home/minimonk/src/esp/esp-at"... silence:0 sdkconfig:/home/minimonk/src/esp/esp-at/module_config/module_esp32_default/sdkconfig.defaults esp-at branch: master esp-at docs version: latest -- Found Git: /usr/bin/git (found version "2.34.1") -- Component directory /home/minimonk/src/esp/esp-at/components/fs_image does not contain a CMakeLists.txt file. No component will be added -- The C compiler identification is GNU 11.2.0 -- The CXX compiler identification is GNU 11.2.0 -- The ASM compiler identification is GNU -- Found assembler: /home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0/xtensa-esp32-elf/bin/xtensa-esp32-elf-gcc -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Check for working C compiler: /home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0/xtensa-esp32-elf/bin/xtensa-esp32-elf-gcc - skipped -- Detecting C compile features -- Detecting C compile features - done -- Detecting CXX compiler ABI info -- Detecting CXX compiler ABI info - done -- Check for working CXX compiler: /home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0/xtensa-esp32-elf/bin/xtensa-esp32-elf-g++ - skipped -- Detecting CXX compile features -- Detecting CXX compile features - done -- Building ESP-IDF components for target esp32 Dependencies lock doesn't exist, solving dependencies. NOTICE: Skipping optional dependency: espressif/cmake_utilities NOTICE: Skipping optional dependency: espressif/bootloader_support_plus ...Updating lock file at /home/minimonk/src/esp/esp-at/dependencies.lock Processing 3 dependencies: [1/3] espressif/esp_websocket_client (1.2.1) [2/3] espressif/mdns (1.2.2) [3/3] idf (5.0.4) NOTICE: Skipping optional dependency: espressif/bootloader_support_plus NOTICE: Skipping optional dependency: espressif/cmake_utilities -- Project sdkconfig file /home/minimonk/src/esp/esp-at/sdkconfig Loading defaults file /home/minimonk/src/esp/esp-at/module_config/module_esp32_default/sdkconfig.defaults... -- Looking for sys/types.h -- Looking for sys/types.h - found -- Looking for stdint.h -- Looking for stdint.h - found -- Looking for stddef.h -- Looking for stddef.h - found -- Check size of time_t -- Check size of time_t - done -- Found Python3: /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/bin/python (found version "3.10.12") found components: Interpreter -- Performing Test C_COMPILER_SUPPORTS_WFORMAT_SIGNEDNESS -- Performing Test C_COMPILER_SUPPORTS_WFORMAT_SIGNEDNESS - Success -- App "esp-at" version: v3.2.0.0-82-ga02beacc -- Adding linker script /home/minimonk/src/esp/esp-at/build/esp-idf/esp_system/ld/memory.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_system/ld/esp32/sections.ld.in -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rom.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.api.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.libgcc.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.newlib-data.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.syscalls.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.newlib-funcs.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/soc/esp32/ld/esp32.peripherals.ld silence:0, ld core:/home/minimonk/src/esp/esp-at/components/at/lib/libesp32_at_core.a Parsing CSV input... Verifying table... -- Components: app_trace app_update at bootloader bootloader_support bt cmock console customized_partitions cxx decoder driver efuse esp-tls esp_adc esp_app_format esp_common esp_eth esp_event esp_gdbstub esp_hid esp_http_client esp_http_server esp_https_ota esp_https_server esp_hw_support esp_lcd esp_local_ctrl esp_netif esp_partition esp_phy esp_pm esp_psram esp_ringbuf esp_rom esp_system esp_timer esp_wifi espcoredump espressif__esp_websocket_client espressif__mdns esptool_py fatfs freertos hal heap http_parser idf_test ieee802154 json log lwip main mbedtls mqtt newlib nvs_flash openthread partition_table perfmon protobuf-c protocomm pthread sdmmc soc spi_flash spiffs tcp_transport ulp unity usb vfs wear_levelling wifi_provisioning wpa_supplicant xtensa -- Component paths: /home/minimonk/src/esp/esp-at/esp-idf/components/app_trace /home/minimonk/src/esp/esp-at/esp-idf/components/app_update /home/minimonk/src/esp/esp-at/components/at /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader_support /home/minimonk/src/esp/esp-at/esp-idf/components/bt /home/minimonk/src/esp/esp-at/esp-idf/components/cmock /home/minimonk/src/esp/esp-at/esp-idf/components/console /home/minimonk/src/esp/esp-at/components/customized_partitions /home/minimonk/src/esp/esp-at/esp-idf/components/cxx /home/minimonk/src/esp/esp-at/components/decoder /home/minimonk/src/esp/esp-at/esp-idf/components/driver /home/minimonk/src/esp/esp-at/esp-idf/components/efuse /home/minimonk/src/esp/esp-at/esp-idf/components/esp-tls /home/minimonk/src/esp/esp-at/esp-idf/components/esp_adc /home/minimonk/src/esp/esp-at/esp-idf/components/esp_app_format /home/minimonk/src/esp/esp-at/esp-idf/components/esp_common /home/minimonk/src/esp/esp-at/esp-idf/components/esp_eth /home/minimonk/src/esp/esp-at/esp-idf/components/esp_event /home/minimonk/src/esp/esp-at/esp-idf/components/esp_gdbstub /home/minimonk/src/esp/esp-at/esp-idf/components/esp_hid /home/minimonk/src/esp/esp-at/esp-idf/components/esp_http_client /home/minimonk/src/esp/esp-at/esp-idf/components/esp_http_server /home/minimonk/src/esp/esp-at/esp-idf/components/esp_https_ota /home/minimonk/src/esp/esp-at/esp-idf/components/esp_https_server /home/minimonk/src/esp/esp-at/esp-idf/components/esp_hw_support /home/minimonk/src/esp/esp-at/esp-idf/components/esp_lcd /home/minimonk/src/esp/esp-at/esp-idf/components/esp_local_ctrl /home/minimonk/src/esp/esp-at/esp-idf/components/esp_netif /home/minimonk/src/esp/esp-at/esp-idf/components/esp_partition /home/minimonk/src/esp/esp-at/esp-idf/components/esp_phy /home/minimonk/src/esp/esp-at/esp-idf/components/esp_pm /home/minimonk/src/esp/esp-at/esp-idf/components/esp_psram /home/minimonk/src/esp/esp-at/esp-idf/components/esp_ringbuf /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom /home/minimonk/src/esp/esp-at/esp-idf/components/esp_system /home/minimonk/src/esp/esp-at/esp-idf/components/esp_timer /home/minimonk/src/esp/esp-at/esp-idf/components/esp_wifi /home/minimonk/src/esp/esp-at/esp-idf/components/espcoredump /home/minimonk/src/esp/esp-at/managed_components/espressif__esp_websocket_client /home/minimonk/src/esp/esp-at/managed_components/espressif__mdns /home/minimonk/src/esp/esp-at/esp-idf/components/esptool_py /home/minimonk/src/esp/esp-at/esp-idf/components/fatfs /home/minimonk/src/esp/esp-at/esp-idf/components/freertos /home/minimonk/src/esp/esp-at/esp-idf/components/hal /home/minimonk/src/esp/esp-at/esp-idf/components/heap /home/minimonk/src/esp/esp-at/esp-idf/components/http_parser /home/minimonk/src/esp/esp-at/esp-idf/components/idf_test /home/minimonk/src/esp/esp-at/esp-idf/components/ieee802154 /home/minimonk/src/esp/esp-at/esp-idf/components/json /home/minimonk/src/esp/esp-at/esp-idf/components/log /home/minimonk/src/esp/esp-at/esp-idf/components/lwip /home/minimonk/src/esp/esp-at/main /home/minimonk/src/esp/esp-at/esp-idf/components/mbedtls /home/minimonk/src/esp/esp-at/esp-idf/components/mqtt /home/minimonk/src/esp/esp-at/esp-idf/components/newlib /home/minimonk/src/esp/esp-at/esp-idf/components/nvs_flash /home/minimonk/src/esp/esp-at/esp-idf/components/openthread /home/minimonk/src/esp/esp-at/esp-idf/components/partition_table /home/minimonk/src/esp/esp-at/esp-idf/components/perfmon /home/minimonk/src/esp/esp-at/esp-idf/components/protobuf-c /home/minimonk/src/esp/esp-at/esp-idf/components/protocomm /home/minimonk/src/esp/esp-at/esp-idf/components/pthread /home/minimonk/src/esp/esp-at/esp-idf/components/sdmmc /home/minimonk/src/esp/esp-at/esp-idf/components/soc /home/minimonk/src/esp/esp-at/esp-idf/components/spi_flash /home/minimonk/src/esp/esp-at/esp-idf/components/spiffs /home/minimonk/src/esp/esp-at/esp-idf/components/tcp_transport /home/minimonk/src/esp/esp-at/esp-idf/components/ulp /home/minimonk/src/esp/esp-at/esp-idf/components/unity /home/minimonk/src/esp/esp-at/esp-idf/components/usb /home/minimonk/src/esp/esp-at/esp-idf/components/vfs /home/minimonk/src/esp/esp-at/esp-idf/components/wear_levelling /home/minimonk/src/esp/esp-at/esp-idf/components/wifi_provisioning /home/minimonk/src/esp/esp-at/esp-idf/components/wpa_supplicant /home/minimonk/src/esp/esp-at/esp-idf/components/xtensa -- Configuring done (7.0s) -- Generating done (0.4s) -- Build files have been written to: /home/minimonk/src/esp/esp-at/build Running ninja in directory /home/minimonk/src/esp/esp-at/build Executing "ninja all"... [6/1180] Generating ../../partition_table/partition-table.binPartition table binary generated. Contents: ******************************************************************************* # ESP-IDF Partition Table # Name, Type, SubType, Offset, Size, Flags phy_init,data,phy,0xf000,4K, otadata,data,ota,0x10000,8K, nvs,data,nvs,0x12000,56K, at_customize,64,0,0x20000,896K, ota_0,app,ota_0,0x100000,1536K, ota_1,app,ota_1,0x280000,1536K, ******************************************************************************* [12/1180] Running utility command for customized_bin Creating NVS binary with version: V2 - Multipage Blob Support Enabled Created NVS binary: ===> /home/minimonk/src/esp/esp-at/build/customized_partitions/mfg_nvs.bin [325/1180] Performing configure step for 'bootloader'-- Found Git: /usr/bin/git (found version "2.34.1") -- The C compiler identification is GNU 11.2.0 -- The CXX compiler identification is GNU 11.2.0 -- The ASM compiler identification is GNU -- Found assembler: /home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0/xtensa-esp32-elf/bin/xtensa-esp32-elf-gcc -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Check for working C compiler: /home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0/xtensa-esp32-elf/bin/xtensa-esp32-elf-gcc - skipped -- Detecting C compile features -- Detecting C compile features - done -- Detecting CXX compiler ABI info -- Detecting CXX compiler ABI info - done -- Check for working CXX compiler: /home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0/xtensa-esp32-elf/bin/xtensa-esp32-elf-g++ - skipped -- Detecting CXX compile features -- Detecting CXX compile features - done -- Building ESP-IDF components for target esp32 -- Project sdkconfig file /home/minimonk/src/esp/esp-at/sdkconfig -- Looking for sys/types.h -- Looking for sys/types.h - found -- Looking for stdint.h -- Looking for stdint.h - found -- Looking for stddef.h -- Looking for stddef.h - found -- Check size of time_t -- Check size of time_t - done -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/soc/esp32/ld/esp32.peripherals.ld -- App "bootloader" version: v5.0.4-dirty -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rom.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.api.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.libgcc.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.newlib-funcs.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader/subproject/main/ld/esp32/bootloader.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader/subproject/main/ld/esp32/bootloader.rom.ld -- Components: bootloader bootloader_support efuse esp_app_format esp_common esp_hw_support esp_rom esp_system esptool_py freertos hal log main micro-ecc newlib partition_table soc spi_flash xtensa -- Component paths: /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader_support /home/minimonk/src/esp/esp-at/esp-idf/components/efuse /home/minimonk/src/esp/esp-at/esp-idf/components/esp_app_format /home/minimonk/src/esp/esp-at/esp-idf/components/esp_common /home/minimonk/src/esp/esp-at/esp-idf/components/esp_hw_support /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom /home/minimonk/src/esp/esp-at/esp-idf/components/esp_system /home/minimonk/src/esp/esp-at/esp-idf/components/esptool_py /home/minimonk/src/esp/esp-at/esp-idf/components/freertos /home/minimonk/src/esp/esp-at/esp-idf/components/hal /home/minimonk/src/esp/esp-at/esp-idf/components/log /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader/subproject/main /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader/subproject/components/micro-ecc /home/minimonk/src/esp/esp-at/esp-idf/components/newlib /home/minimonk/src/esp/esp-at/esp-idf/components/partition_table /home/minimonk/src/esp/esp-at/esp-idf/components/soc /home/minimonk/src/esp/esp-at/esp-idf/components/spi_flash /home/minimonk/src/esp/esp-at/esp-idf/components/xtensa -- Configuring done (6.9s) -- Generating done (0.1s) -- Build files have been written to: /home/minimonk/src/esp/esp-at/build/bootloader [101/102] Generating binary image from built executableesptool.py v4.7.0 Creating esp32 image... Merged 1 ELF section Successfully created esp32 image. Generated /home/minimonk/src/esp/esp-at/build/bootloader/bootloader.bin [102/102] cd /home/minimonk/src/esp/esp-at/build/bootloade...me/minimonk/src/esp/esp-at/build/bootloader/bootloader.binBootloader binary size 0x68b0 bytes. 0x750 bytes (7%) free. [1178/1180] Generating binary image from built executableesptool.py v4.7.0 Creating esp32 image... Merged 2 ELF sections Successfully created esp32 image. Generated /home/minimonk/src/esp/esp-at/build/esp-at.bin [1179/1180] cd /home/minimonk/src/esp/esp-at/build/esp-idf...n-table.bin /home/minimonk/src/esp/esp-at/build/esp-at.binFAILED: esp-idf/esptool_py/CMakeFiles/app_check_size /home/minimonk/src/esp/esp-at/build/esp-idf/esptool_py/CMakeFiles/app_check_size cd /home/minimonk/src/esp/esp-at/build/esp-idf/esptool_py && /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/bin/python /home/minimonk/src/esp/esp-at/esp-idf/components/partition_table/check_sizes.py --offset 0x8000 partition --type app /home/minimonk/src/esp/esp-at/build/partition_table/partition-table.bin /home/minimonk/src/esp/esp-at/build/esp-at.bin Error: All app partitions are too small for binary esp-at.bin size 0x184580: - Part 'ota_0' 0/16 @ 0x100000 size 0x180000 (overflow 0x4580) - Part 'ota_1' 0/17 @ 0x280000 size 0x180000 (overflow 0x4580) ninja: build stopped: subcommand failed. ninja failed with exit code 1, output of the command is in the /home/minimonk/src/esp/esp-at/build/log/idf_py_stderr_output_11148 and /home/minimonk/src/esp/esp-at/build/log/idf_py_stdout_output_11148 A fatal error occurred: idf.py build failed |
잘 안되네.. 빡세고만..
build.py를 실행해서 설정된 모델은 아래 파일을 삭제하고 설정하면 된다.
| $ vi build.py $ find . -name module_info.json ./build/module_info.json |
silence mode 끄면 메시지가 많아져서 용량이 커지나 보다 -_-
| $ ./build.py build Platform name: 1. PLATFORM_ESP32 2. PLATFORM_ESP32C3 3. PLATFORM_ESP32C2 4. PLATFORM_ESP32C6 choose(range[1,4]):1 Module name: 1. WROOM-32 2. WROVER-32 3. PICO-D4 4. SOLO-1 5. MINI-1 (description: ESP32-U4WDH chip inside) 6. ESP32-SDIO 7. ESP32-D2WD (description: 2MB flash, No OTA) choose(range[1,7]):1 Enable silence mode to remove some logs and reduce the firmware size? 0. No 1. Yes choose(range[0,1]):1 Platform name:ESP32 Module name:WROOM-32 Silence:1 submodules check completed for updates. mbedtls_dynamic_buffer.patch does not need to be applied. patches check completed for updates. Ready to set up environment variables.. PATH is /home/minimonk/src/esp/esp-idf/components/espcoredump:/home/minimonk/src/esp/esp-idf/components/partition_table:/home/minimonk/src/esp/esp-idf/components/app_update:/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/12.1_20231023/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf/esp-13.2.0_20230928/xtensa-esp-elf/bin:/home/minimonk/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230921/openocd-esp32/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/12.1_20231023/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf/esp-13.2.0_20230928/xtensa-esp-elf/bin:/home/minimonk/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230921/openocd-esp32/bin:/home/minimonk/.espressif/python_env/idf5.3_py3.10_env/bin:/home/minimonk/src/esp/esp-idf/tools:/home/minimonk/.local/bin:/home/minimonk/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin IDF_PYTHON_ENV_PATH is /home/minimonk/.espressif/python_env/idf5.3_py3.10_env sys.platform is linux Not using an unsupported version of tool xtensa-esp-elf-gdb found in PATH: 12.1_20231023. Not using an unsupported version of tool xtensa-esp32-elf found in PATH: esp-13.2.0_20230928-13.2.0. Not using an unsupported version of tool openocd-esp32 found in PATH: v0.12.0-esp32-20230921. export str is OPENOCD_SCRIPTS=/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230419/openocd-esp32/share/openocd/scripts ESP_ROM_ELF_DIR=/home/minimonk/.espressif/tools/esp-rom-elfs/20220823/ ESP_IDF_VERSION=5.0 PATH=/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/11.2_20220823/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0/xtensa-esp32-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230419/openocd-esp32/bin:/home/minimonk/src/esp/esp-at/esp-idf/tools:$PATH IDF_DEACTIVATE_FILE_PATH=/tmp/tmphrnvyazvidf_30112 PATH is /home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/11.2_20220823/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp32-elf/esp-2022r1-11.2.0/xtensa-esp32-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230419/openocd-esp32/bin:/home/minimonk/src/esp/esp-at/esp-idf/tools:$PATH:/home/minimonk/src/esp/esp-idf/components/espcoredump:/home/minimonk/src/esp/esp-idf/components/partition_table:/home/minimonk/src/esp/esp-idf/components/app_update:/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/12.1_20231023/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf/esp-13.2.0_20230928/xtensa-esp-elf/bin:/home/minimonk/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230921/openocd-esp32/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf-gdb/12.1_20231023/xtensa-esp-elf-gdb/bin:/home/minimonk/.espressif/tools/xtensa-esp-elf/esp-13.2.0_20230928/xtensa-esp-elf/bin:/home/minimonk/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin:/home/minimonk/.espressif/tools/openocd-esp32/v0.12.0-esp32-20230921/openocd-esp32/bin:/home/minimonk/.espressif/python_env/idf5.3_py3.10_env/bin:/home/minimonk/src/esp/esp-idf/tools:/home/minimonk/.local/bin:/home/minimonk/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin IDF_PYTHON_ENV_PATH is /home/minimonk/.espressif/python_env/idf5.3_py3.10_env Executing action: all (aliases: build) Running ninja in directory /home/minimonk/src/esp/esp-at/build Executing "ninja all"... [0/1] Re-running CMake...silence:1 sdkconfig:/home/minimonk/src/esp/esp-at/module_config/module_esp32_default/sdkconfig_silence.defaults esp-at branch: master esp-at docs version: latest -- Component directory /home/minimonk/src/esp/esp-at/components/fs_image does not contain a CMakeLists.txt file. No component will be added -- Building ESP-IDF components for target esp32 NOTICE: Skipping optional dependency: espressif/cmake_utilities NOTICE: Skipping optional dependency: espressif/bootloader_support_plus Processing 3 dependencies: [3/3] idf (5.0.4)NOTICE: Skipping optional dependency: espressif/bootloader_support_plus NOTICE: Skipping optional dependency: espressif/cmake_utilities -- Project sdkconfig file /home/minimonk/src/esp/esp-at/sdkconfig Loading defaults file /home/minimonk/src/esp/esp-at/module_config/module_esp32_default/sdkconfig_silence.defaults... -- App "esp-at" version: v3.2.0.0-82-ga02beacc -- Adding linker script /home/minimonk/src/esp/esp-at/build/esp-idf/esp_system/ld/memory.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_system/ld/esp32/sections.ld.in -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rom.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.api.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.libgcc.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.newlib-data.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.syscalls.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.newlib-funcs.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/soc/esp32/ld/esp32.peripherals.ld silence:1, ld core:/home/minimonk/src/esp/esp-at/components/at/lib/libesp32_at_core_silence.a Parsing CSV input... Verifying table... -- Components: app_trace app_update at bootloader bootloader_support bt cmock console customized_partitions cxx decoder driver efuse esp-tls esp_adc esp_app_format esp_common esp_eth esp_event esp_gdbstub esp_hid esp_http_client esp_http_server esp_https_ota esp_https_server esp_hw_support esp_lcd esp_local_ctrl esp_netif esp_partition esp_phy esp_pm esp_psram esp_ringbuf esp_rom esp_system esp_timer esp_wifi espcoredump espressif__esp_websocket_client espressif__mdns esptool_py fatfs freertos hal heap http_parser idf_test ieee802154 json log lwip main mbedtls mqtt newlib nvs_flash openthread partition_table perfmon protobuf-c protocomm pthread sdmmc soc spi_flash spiffs tcp_transport ulp unity usb vfs wear_levelling wifi_provisioning wpa_supplicant xtensa -- Component paths: /home/minimonk/src/esp/esp-at/esp-idf/components/app_trace /home/minimonk/src/esp/esp-at/esp-idf/components/app_update /home/minimonk/src/esp/esp-at/components/at /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader_support /home/minimonk/src/esp/esp-at/esp-idf/components/bt /home/minimonk/src/esp/esp-at/esp-idf/components/cmock /home/minimonk/src/esp/esp-at/esp-idf/components/console /home/minimonk/src/esp/esp-at/components/customized_partitions /home/minimonk/src/esp/esp-at/esp-idf/components/cxx /home/minimonk/src/esp/esp-at/components/decoder /home/minimonk/src/esp/esp-at/esp-idf/components/driver /home/minimonk/src/esp/esp-at/esp-idf/components/efuse /home/minimonk/src/esp/esp-at/esp-idf/components/esp-tls /home/minimonk/src/esp/esp-at/esp-idf/components/esp_adc /home/minimonk/src/esp/esp-at/esp-idf/components/esp_app_format /home/minimonk/src/esp/esp-at/esp-idf/components/esp_common /home/minimonk/src/esp/esp-at/esp-idf/components/esp_eth /home/minimonk/src/esp/esp-at/esp-idf/components/esp_event /home/minimonk/src/esp/esp-at/esp-idf/components/esp_gdbstub /home/minimonk/src/esp/esp-at/esp-idf/components/esp_hid /home/minimonk/src/esp/esp-at/esp-idf/components/esp_http_client /home/minimonk/src/esp/esp-at/esp-idf/components/esp_http_server /home/minimonk/src/esp/esp-at/esp-idf/components/esp_https_ota /home/minimonk/src/esp/esp-at/esp-idf/components/esp_https_server /home/minimonk/src/esp/esp-at/esp-idf/components/esp_hw_support /home/minimonk/src/esp/esp-at/esp-idf/components/esp_lcd /home/minimonk/src/esp/esp-at/esp-idf/components/esp_local_ctrl /home/minimonk/src/esp/esp-at/esp-idf/components/esp_netif /home/minimonk/src/esp/esp-at/esp-idf/components/esp_partition /home/minimonk/src/esp/esp-at/esp-idf/components/esp_phy /home/minimonk/src/esp/esp-at/esp-idf/components/esp_pm /home/minimonk/src/esp/esp-at/esp-idf/components/esp_psram /home/minimonk/src/esp/esp-at/esp-idf/components/esp_ringbuf /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom /home/minimonk/src/esp/esp-at/esp-idf/components/esp_system /home/minimonk/src/esp/esp-at/esp-idf/components/esp_timer /home/minimonk/src/esp/esp-at/esp-idf/components/esp_wifi /home/minimonk/src/esp/esp-at/esp-idf/components/espcoredump /home/minimonk/src/esp/esp-at/managed_components/espressif__esp_websocket_client /home/minimonk/src/esp/esp-at/managed_components/espressif__mdns /home/minimonk/src/esp/esp-at/esp-idf/components/esptool_py /home/minimonk/src/esp/esp-at/esp-idf/components/fatfs /home/minimonk/src/esp/esp-at/esp-idf/components/freertos /home/minimonk/src/esp/esp-at/esp-idf/components/hal /home/minimonk/src/esp/esp-at/esp-idf/components/heap /home/minimonk/src/esp/esp-at/esp-idf/components/http_parser /home/minimonk/src/esp/esp-at/esp-idf/components/idf_test /home/minimonk/src/esp/esp-at/esp-idf/components/ieee802154 /home/minimonk/src/esp/esp-at/esp-idf/components/json /home/minimonk/src/esp/esp-at/esp-idf/components/log /home/minimonk/src/esp/esp-at/esp-idf/components/lwip /home/minimonk/src/esp/esp-at/main /home/minimonk/src/esp/esp-at/esp-idf/components/mbedtls /home/minimonk/src/esp/esp-at/esp-idf/components/mqtt /home/minimonk/src/esp/esp-at/esp-idf/components/newlib /home/minimonk/src/esp/esp-at/esp-idf/components/nvs_flash /home/minimonk/src/esp/esp-at/esp-idf/components/openthread /home/minimonk/src/esp/esp-at/esp-idf/components/partition_table /home/minimonk/src/esp/esp-at/esp-idf/components/perfmon /home/minimonk/src/esp/esp-at/esp-idf/components/protobuf-c /home/minimonk/src/esp/esp-at/esp-idf/components/protocomm /home/minimonk/src/esp/esp-at/esp-idf/components/pthread /home/minimonk/src/esp/esp-at/esp-idf/components/sdmmc /home/minimonk/src/esp/esp-at/esp-idf/components/soc /home/minimonk/src/esp/esp-at/esp-idf/components/spi_flash /home/minimonk/src/esp/esp-at/esp-idf/components/spiffs /home/minimonk/src/esp/esp-at/esp-idf/components/tcp_transport /home/minimonk/src/esp/esp-at/esp-idf/components/ulp /home/minimonk/src/esp/esp-at/esp-idf/components/unity /home/minimonk/src/esp/esp-at/esp-idf/components/usb /home/minimonk/src/esp/esp-at/esp-idf/components/vfs /home/minimonk/src/esp/esp-at/esp-idf/components/wear_levelling /home/minimonk/src/esp/esp-at/esp-idf/components/wifi_provisioning /home/minimonk/src/esp/esp-at/esp-idf/components/wpa_supplicant /home/minimonk/src/esp/esp-at/esp-idf/components/xtensa -- Configuring done (4.9s) -- Generating done (0.4s) -- Build files have been written to: /home/minimonk/src/esp/esp-at/build [8/1147] Running utility command for customized_bin Creating NVS binary with version: V2 - Multipage Blob Support Enabled Created NVS binary: ===> /home/minimonk/src/esp/esp-at/build/customized_partitions/mfg_nvs.bin [0/1] Re-running CMake...-- Building ESP-IDF components for target esp32 -- Project sdkconfig file /home/minimonk/src/esp/esp-at/sdkconfig -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/soc/esp32/ld/esp32.peripherals.ld -- App "bootloader" version: v5.0.4-dirty -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rom.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.api.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.libgcc.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom/esp32/ld/esp32.rohttp://m.newlib-funcs.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader/subproject/main/ld/esp32/bootloader.ld -- Adding linker script /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader/subproject/main/ld/esp32/bootloader.rom.ld -- Components: bootloader bootloader_support efuse esp_app_format esp_common esp_hw_support esp_rom esp_system esptool_py freertos hal log main micro-ecc newlib partition_table soc spi_flash xtensa -- Component paths: /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader_support /home/minimonk/src/esp/esp-at/esp-idf/components/efuse /home/minimonk/src/esp/esp-at/esp-idf/components/esp_app_format /home/minimonk/src/esp/esp-at/esp-idf/components/esp_common /home/minimonk/src/esp/esp-at/esp-idf/components/esp_hw_support /home/minimonk/src/esp/esp-at/esp-idf/components/esp_rom /home/minimonk/src/esp/esp-at/esp-idf/components/esp_system /home/minimonk/src/esp/esp-at/esp-idf/components/esptool_py /home/minimonk/src/esp/esp-at/esp-idf/components/freertos /home/minimonk/src/esp/esp-at/esp-idf/components/hal /home/minimonk/src/esp/esp-at/esp-idf/components/log /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader/subproject/main /home/minimonk/src/esp/esp-at/esp-idf/components/bootloader/subproject/components/micro-ecc /home/minimonk/src/esp/esp-at/esp-idf/components/newlib /home/minimonk/src/esp/esp-at/esp-idf/components/partition_table /home/minimonk/src/esp/esp-at/esp-idf/components/soc /home/minimonk/src/esp/esp-at/esp-idf/components/spi_flash /home/minimonk/src/esp/esp-at/esp-idf/components/xtensa -- Configuring done (5.5s) -- Generating done (0.1s) -- Build files have been written to: /home/minimonk/src/esp/esp-at/build/bootloader [94/95] Generating binary image from built executableesptool.py v4.7.0 Creating esp32 image... Merged 1 ELF section Successfully created esp32 image. Generated /home/minimonk/src/esp/esp-at/build/bootloader/bootloader.bin [95/95] cd /home/minimonk/src/esp/esp-at/build/bootloader/...me/minimonk/src/esp/esp-at/build/bootloader/bootloader.binBootloader binary size 0x6360 bytes. 0xca0 bytes (11%) free. [1145/1147] Generating binary image from built executableesptool.py v4.7.0 Creating esp32 image... Merged 2 ELF sections Successfully created esp32 image. Generated /home/minimonk/src/esp/esp-at/build/esp-at.bin [1146/1147] cd /home/minimonk/src/esp/esp-at/build/esp-idf...n-table.bin /home/minimonk/src/esp/esp-at/build/esp-at.binesp-at.bin binary size 0x1621a0 bytes. Smallest app partition is 0x180000 bytes. 0x1de60 bytes (8%) free. [1147/1147] Running utility command for factory_bin0x1000,bootloader/bootloader.bin 0x100000,esp-at.bin 0x8000,partition_table/partition-table.bin 0x10000,ota_data_initial.bin 0x20000,at_customize.bin 0x21000,customized_partitions/mfg_nvs.bin Create /home/minimonk/src/esp/esp-at/build/factory/factory_WROOM-32.bin for WROOM-32 finished Project build complete. To flash, run this command: /home/minimonk/.espressif/python_env/idf5.3_py3.10_env/bin/python esp-idf/components/esptool_py/esptool/esptool.py -p (PORT) -b 460800 --before default_reset --after hard_reset --chip esp32 write_flash --flash_mode dio --flash_size 4MB --flash_freq 40m 0x1000 build/bootloader/bootloader.bin 0x8000 build/partition_table/partition-table.bin 0x10000 build/ota_data_initial.bin 0x20000 build/at_customize.bin 0x21000 build/customized_partitions/mfg_nvs.bin 0x100000 build/esp-at.bin or run 'idf.py -p (PORT) flash' |
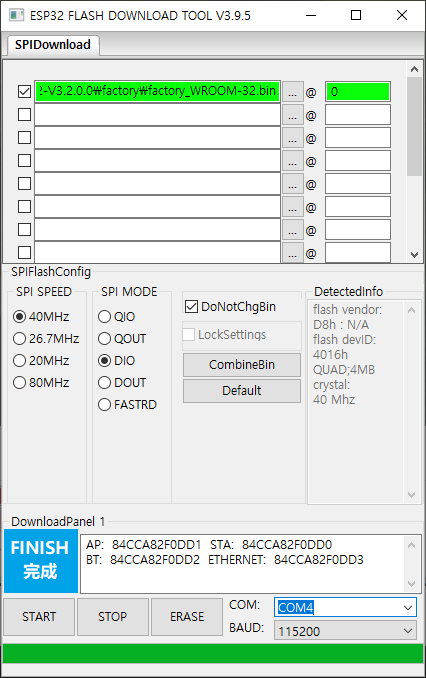
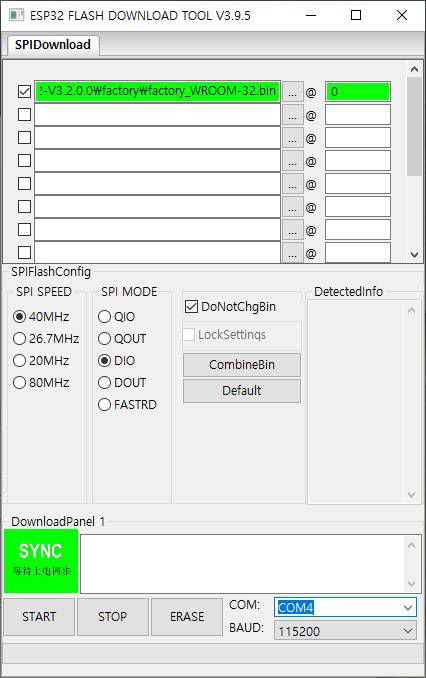
보드는 안가지고 있어서 나중에 구워봐야 할 듯.
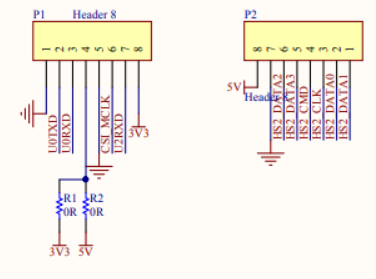
그러고 보니.. 포트 안바꾸고 했네 -_-
+
리눅스 i5-2520m 에서 빌드하는데 clean / build 하니 1분 30초대..
윈도우에서 하는게 문제인 듯? G4400T 이긴 하지만 너무 차이나네
| or run 'idf.py -p (PORT) flash' real 1m38.058s user 4m4.487s sys 0m46.621s |
'embeded > esp32' 카테고리의 다른 글
| esp32 wifi/bt on linux (0) | 2024.08.13 |
|---|---|
| esp32 at 소스 빌드(윈도우) (0) | 2023.12.19 |
| esp-idf on linux (0) | 2023.12.19 |
| esp32 idf on windows (0) | 2023.12.18 |
| esp32 uart 포트 바꾸기 (0) | 2023.12.16 |